|
|
Ähnliche Berichte:
|
Papers in anderen sprachen:
|
|
|
informatik referate |
Inhalt
1. Einleitung: "Baut mal was mit Schrittmotoren!"
2. Was n Schrittmotor?
2.1 Bibolare Motoren
2 Unipolare Motoren
Ansteuerung von Schrittmotoren durch einen Computer: "Wer rechnet hier
3.1 Interface für unipolare Motoren
2 Interface für bipolare Motoren
4. Betrieb des Interface: "Wenn der Motor läuft und Lampen brennen"
Programmierung des Interface
2 Hardwareansteuerung des Interface
Anhang: Technische Daten der Interface: "Lüpt was ?"
Einleitung: "Baut mal was mit Schrittmotoren "
Tja, wofür werden nun Schrittmotoren gebraucht?
Schrittmotoren werden vorwiegend in der Industrie verwendet. Mit Schrittmotoren werden z.B. Roboter, Plotter oder Köpfe einer Festplatte bewegen. Der Vorteil eines Schrittmotors ist, daß er exakt an einer Position angehalten werden kann. Der Schrittmotor kann, je nach Typ, auf ° - ° Grad genau positioniert werden und somit kann ein mit Schrittmotoren betriebener Plotter Zeichnungen mit sehr hoher Genauigkeit anfertigen.
Was`n Schrittmotor?
Ein Elektromotor, dessen Antriebswelle bei jedem Stromimpuls eine Drehung um einen gleich großen Winkelschritt ausführt. Die Anzahl der Impulse einer bestimmten Impulsfolge ergibt die gewünschte Winkeldrehung als ganzzahliges Vielfaches der Teildrehungen.'
Es werden zwei, in ihrer Bauform unterschiedliche Motorentypen verwendet; unipolare- und bipolare
Motoren. Auch die Ansteuerung dieser Motoren ist unterschiedlich.
Bipolare Motoren
Ein Schrittmotor besteht aus einem Permanentmagneten und zwei Spulen. Die Spulen sind im ° Winkel zueinander angeordnet.
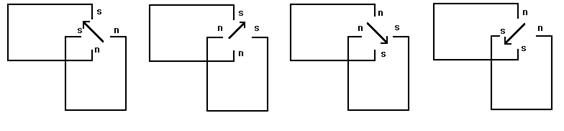
Abb. 1: Schematische Darstellung eines bipolaren Schrittmotors
Der Nordpol des Permanentmagneten wird von den beiden Spulen zwischen den Südpolen festgehalten. Wenn nun die Spulen umgepolt werden, muß der Permanentmagnet sich zwangsläufig auch in die neue Position mitdrehen und der Schrittmotor macht einen Schritt. Durch diese Art der Positionirung ist ein exakter Stopp auf einem Punkt möglich. Die Schrittmotoren sind außerdem durch die Anziehungs- und Abstoßungskräfte verhältnismäßig leistungsstark.
Zum Betrieb eines bipolaren Schrittmotors müssen beide angesteuert werden.
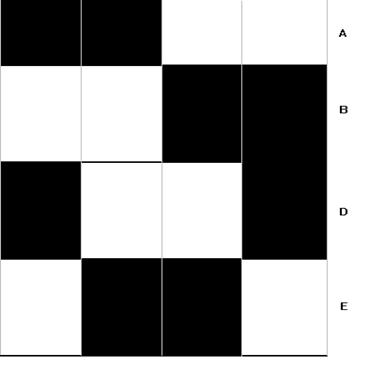
Abb. 2: Impulsdiagramm zur Abhängigkeit der Polarität der vier Stränge des
Schrittmotors
Unipolare Motoren
Der unipolare Motor besteht aus einer Spule in der sich der Permanentmagnet bewegt. Die Spule hat fünf Anzapfungen. Eine ist der gemeinsame Anschluß, die anderen werden nacheinander geschaltet.
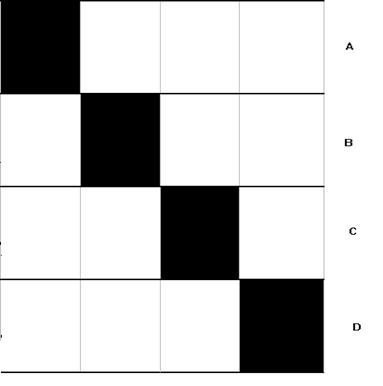
Abb. 3:Impulsdiagramm zur Abhängigkeit der Polarität der vier Pole des
Schrittmotors
3. Ansteuerung von Schrittmotoren durch einen Computer: "Wer Rechnet da ?"
Um die softwareseitige Ansteuerung des Interfaces zu vereinfachen, ist die Applikation hardwarebasiert, d.h. die Software übernimmt nur Steuerungsaufgaben.
Dies macht es aber auch nötig, daß Hardware die motorspezifische Anpassung übernimmt.
Interface f r unipolare Motoren
Die Schaltung ist aus einem Zähler entwickelt, der direkt durch den Rechner angesteuert wird. Die
Signale der dezimalen BCD-Ausgänge werden durch eine Transistorstufe verstärkt.
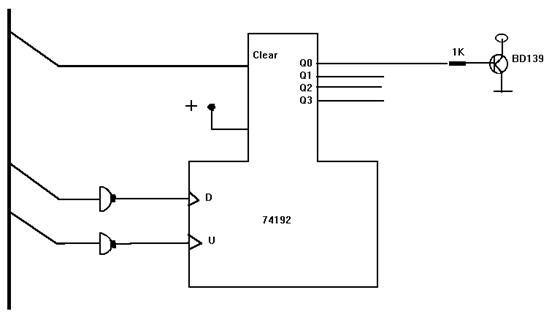
Abb. 4: Schaltplan Interface für unipolare Motoren
Interface f r bipolare Motoren
Die Schaltung ist aus einem Zähler entwickelt, der direkt durch den Rechner angesteuert wird. Die BCD-Signale werden durch einen Decoder in die vom Motor benötigten Signale umgesetzt, und durch eine Polwenderschaltung auf Versorgungsspannungsniveau angehoben.
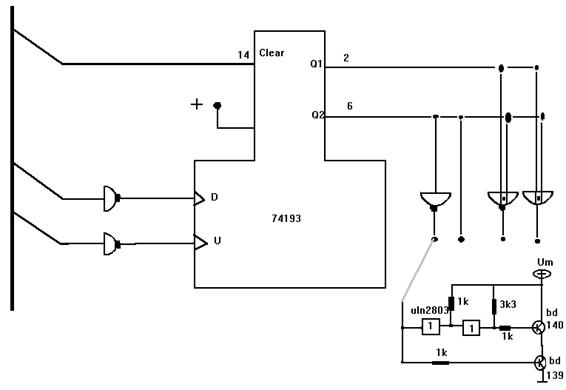
Abb. 5: Schaltplan Interface für bipolare Motoren
Betrieb des Interface:
Wenn der Motor läuft und Lampen brennen"
Durch die hardwarenahe Auslegung des Interface gestaltet sich der Betrieb einfach. An die Pfostenverbindungen werden die entsprechenden Motoren angeschlossen, an die Klemmen 2 muß eine Gleichspannung von ca. 7 - 2 V gelegt werden und an die Klemmen , 4 die Versorgungs(gleich)spannung der Motoren. Die Klemmen , 3 sind kurzgeschlossen und dienen als Masseanschlüsse.
4.1 Programmierung des Interface
Zur Ansteuerung des Interface durch einen Computer muß die entsprechende Leitung des Statusregisters gesetzt werden, und eine Datenleitung muß abwechselnd ein- und ausgeschaltet werden.
Welche Leitungen das sind und welche Adressen diese haben, ist dem Anhang zu entnehmen.
4.2 Hardwareansteuerung des Interface
Für die Ansteuerung des Interface müssen nur zwei Bedingungen erfüllt werden:
Die |Clear - Leitung des Zählers muß auf Masse gelegt werden und einer der Takteingänge muß angesteuert, der andere auf Masse gelegt werden.
Anhang: Technische Daten der Interfaces: L pt was ?"
Mögliche Basisadressen der parallelen Schnittstelle:
|
Schnittstelle |
LPT 1(PRN) |
LPT 2 |
LPT 1 (HGA) |
|
dezimal |
|
|
|
|
hexadezimal |
|
|
3BC |
Bei dem Interface für bipolare Motoren verwendete Leitungen:
|
Offset 0 | |||
|
D 0 |
|
pin2 |
Motor 1 down |
|
D 1 |
|
pin3 |
Motor 1 up |
Offset 3
Strobe 2^0 pin 1 Motor 1 |inable
Bei dem Interface für unipolare Motoren verwendete Leitungen:
|
Offset 0 | |||
|
D 0 |
|
pin2 |
Motor 1 down |
|
D 1 |
|
pin3 |
Motor 1 up |
|
D 2 |
|
pin 4 |
Motor 2 down |
|
D 3 |
|
pin 5 |
Motor 2 up |
|
Offset 3 | |||
|
Strobe |
|
pin 1 |
Motor 1 |inable |
|
Autofeed |
|
pin 14 |
Motor 2 |inable |
| Referate über:
|
|
Datenschutz |
| Copyright ©
2024 - Alle Rechte vorbehalten AZreferate.com |
Verwenden sie diese referate ihre eigene arbeit zu schaffen. Kopieren oder herunterladen nicht einfach diese # Hauptseite # Kontact / Impressum |